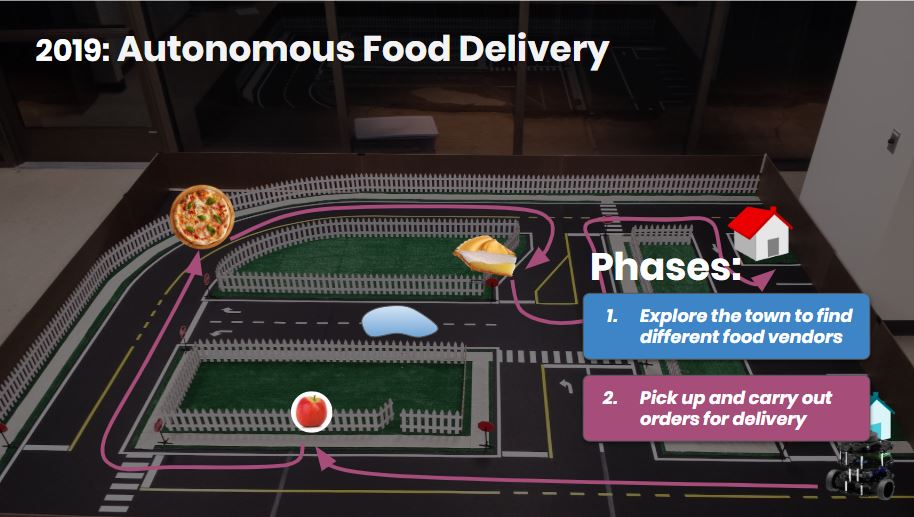
We developed a ROS package for a TurtleBot3 Burger to autonomously explore a mock environment where it needed to "pick up and deliver" food items based on the images it saw along the way. This project was a part of the course AA 274 (Principles of Robotic Autonomy) at Stanford
Autonomous Food Pickup/Delivery using a Turtlebot
Problem Description
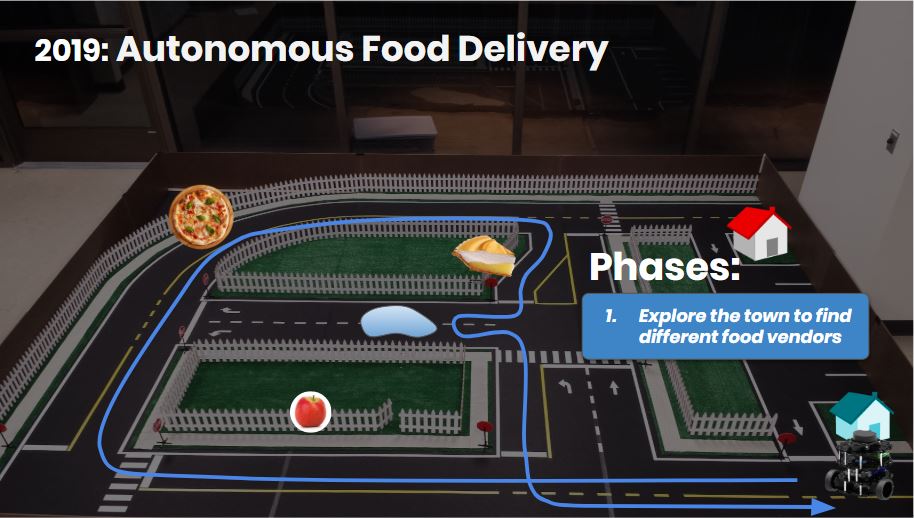
This video shows object detection using computer vision algorithm YOLO. You can see that the robot is driving around exploring the map while detecting pictures as objects.
We first plan a path to go and fetch the food item. Then the robot goes to pickup the order and then goes near it to demonstrate that it is picking it up.